Vencedores de Hackathon da Nasa participam de Simpósio de Engenharia da Uninter
Autor: Bárbara Possiede - Estagiária de Jornalismo
É possível prever uma catástrofe? Seria possível evitar, por exemplo, as queimadas no Pantanal ocorridas no mês de setembro? A equipe Polaris, vencedora do NASA’s International Space Apps Challenge, afirma que sim.
“Criamos um aplicativo web, que conta com a tecnologia de aprendizado de máquina e inteligência artificial. Usando dados ambientais e climáticos, coletados em tempo real a partir dos satélites de diversas agências espaciais, e realizando o cruzamento com os dados abertos do governo, podemos entender as especificidades de cada situação. Por exemplo, o que indica que uma queimada está para acontecer? Quais as condições de umidade do ar e a temperatura? Quando esses padrões são identificados, é possível emitir um alerta para a prefeitura de uma região e possibilitar que alguma ação possa ser tomada antes de acontecer uma catástrofe’, explica Lucas Seixas, um dos integrantes.
O projeto foi desenvolvido durante o Space Apps Challenge em Curitiba. O evento é conhecido por ser o maior hackathon do mundo, que estimula a criação de soluções para os principais problemas globais. O termo ‘hackathon’ é usado para designar maratonas de programação que geralmente acontecem em um período full time de 2 a 3 dias, ou seja, os participantes entram na sexta-feira e só saem no domingo. No evento da Nasa, não existe a especificidade pela programação. O desafio consiste em gerar ideias, os participantes devem apresentar uma proposta sólida e que possa ser executada.
Além do internacionalista Lucas, o estudante Gustavo Vargas, que está concluindo sua formação em Sistemas de Informação, e a jovem Âmally Aguiar, formada em gastronomia, estiveram no V Simpósio de Engenharias e Tecnologias da Uninter, representando a equipe.
Os 3 contaram detalhes do evento em que participaram. Gustavo esclareceu um ponto importante para o início do desafio, “para a montagem das equipes, em eventos como esse, é interessante ter variedade de cursos, ideias e interesses. Opiniões diferentes contam muito para o desenvolvimento de um projeto”.
E Lucas esclareceu um assunto temido pelos participantes: o pitch. “O pitch se traduz como arremesso. É basicamente você jogar uma ideia para alguém, no nosso caso os jurados. Tivemos que mostrar nosso projeto e fazer eles se interessarem. É o fundamental para você ser classificado, vai fazer a diferença, podendo te deixar em último ou primeiro lugar”.
Âmally aproveitou a oportunidade para incentivar os alunos da Uninter a participar em eventos com esse formato: “eu sou prova viva de que você consegue. Foi meu primeiro hackathon. Não crie barreiras antes de tentar, tente ao menos uma vez e você vai ver que realmente consegue”.
Trabalhos de pesquisa da Escola Politécnica
Encerrada a palestra magna, foi a hora de conhecer os projetos de pesquisa realizados pelos estudantes da Escola Politécnica. Seguindo o formato dos dias anteriores, os vídeos gravados pelos alunos foram exibidos enquanto os estudantes estavam disponíveis no chat do evento para a troca de ideias.
O primeiro trabalho, sob orientação dos professores Jéssica Alvares Coppi e Charles Way Hun Fung, foi apresentado pelos alunos Kim Alan Vasco, Murilo Camargo, Janaina Santos da Silva e Adriana Pasche. Intitulado Desenvolvimento de tecnologia inclusiva para interface com surdos, o trabalho se pauta no desenvolvimento de um programa que realize a tradução do português para a Língua Brasileira de Sinais. “Nós queremos que esse aplicativo torne o dia a dia possível e muito mais acessível para as pessoas com surdez”, explica Kim.
O projeto Planejamento e especificação contínua de requisitos de software com equipes colaborativas foi exposto pelos alunos Gabriel Cieslak e Bernardo do Nascimento Kassick. Sob os cuidados da professora Cristiane Huve, eles buscaram desenvolver uma abordagem colaborativa para o planejamento contínuo dentro da área de requisitos de softwares, buscando garantir manutenção e qualidade do produto final.
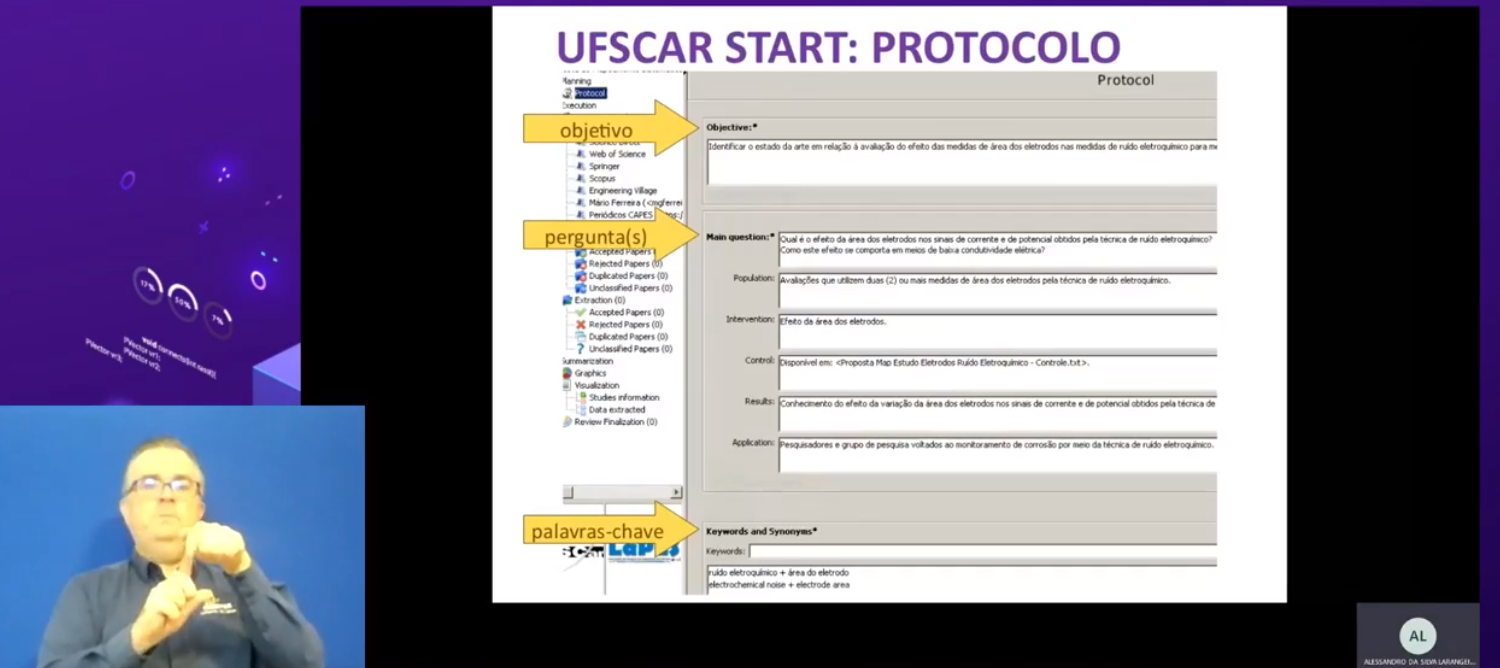
Liderado pela professora Ana Carolina Tedeschi Gomes Abrantes, a pesquisa Proposta de mapeamento sistemático para estudo da influência da área de eletrodos de trabalho nos sinais obtidos pela técnica de ruído eletroquímico foi apresentada pelo discente Alessandro Larangeiras. Neste trabalho, o objetivo foi identificar os estudos que investigam a relação entre os eletrodos e a qualidade nos sinais coletados por meio da técnica de ruído eletroquímico, importante para identificar processos corrosivos.
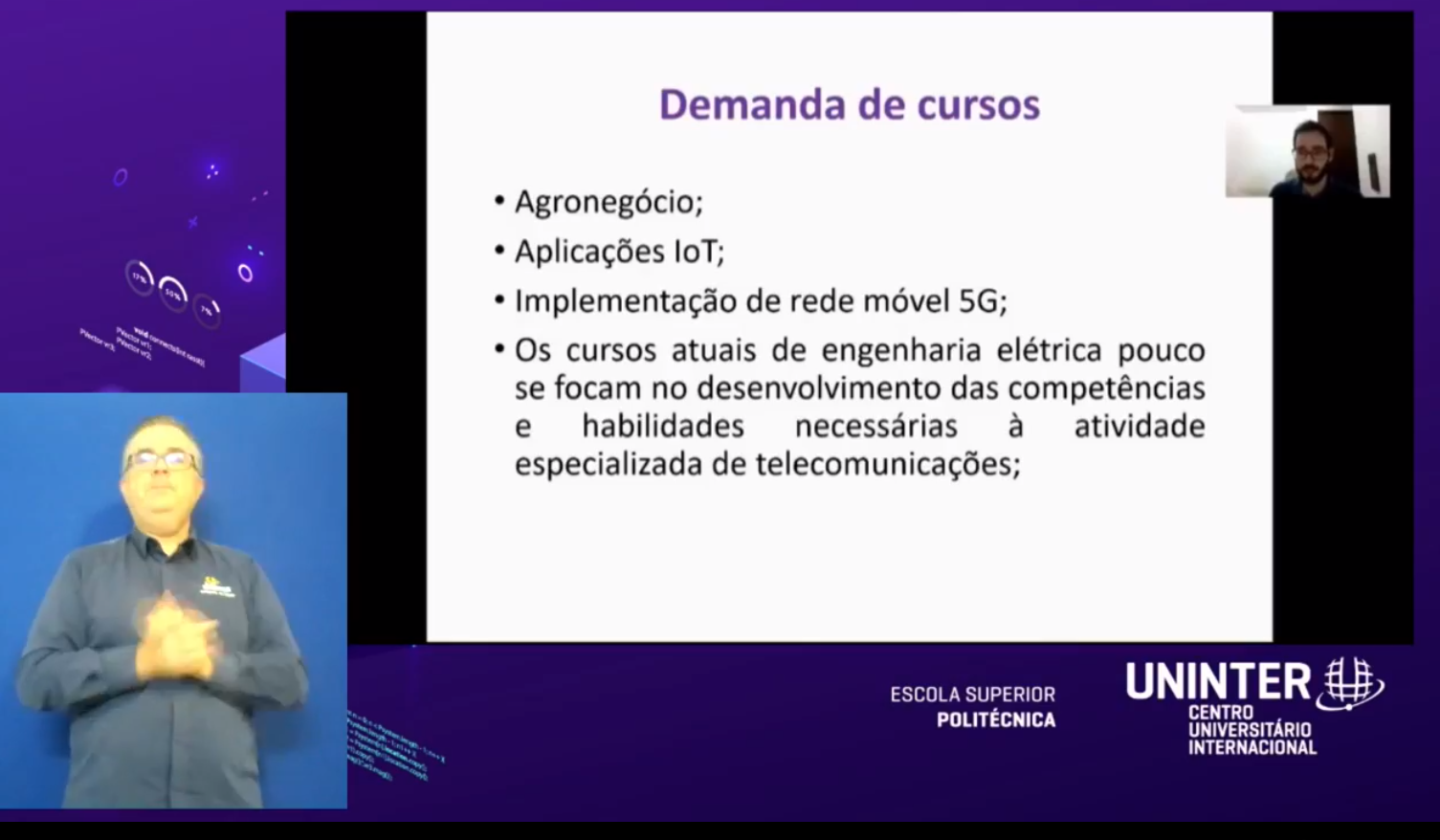
Denominado Kit didático para sistemas temporais de comutação de sinais, o projeto apresentado pelo estudante Julio Cesar Jacomel identificou uma deficiência nos cursos atuais de Engenharia Elétrica, que dão pouca ênfase no desenvolvimento das competências e habilidades necessárias à atividade especializada de telecomunicações. Por isso, o estudo buscou meios para desenvolver essas habilidades entre os bacharelandos de forma rápida e objetiva. Julio foi orientado pelos professores Amilton Rattmann e Gian Carlo Brustolin.
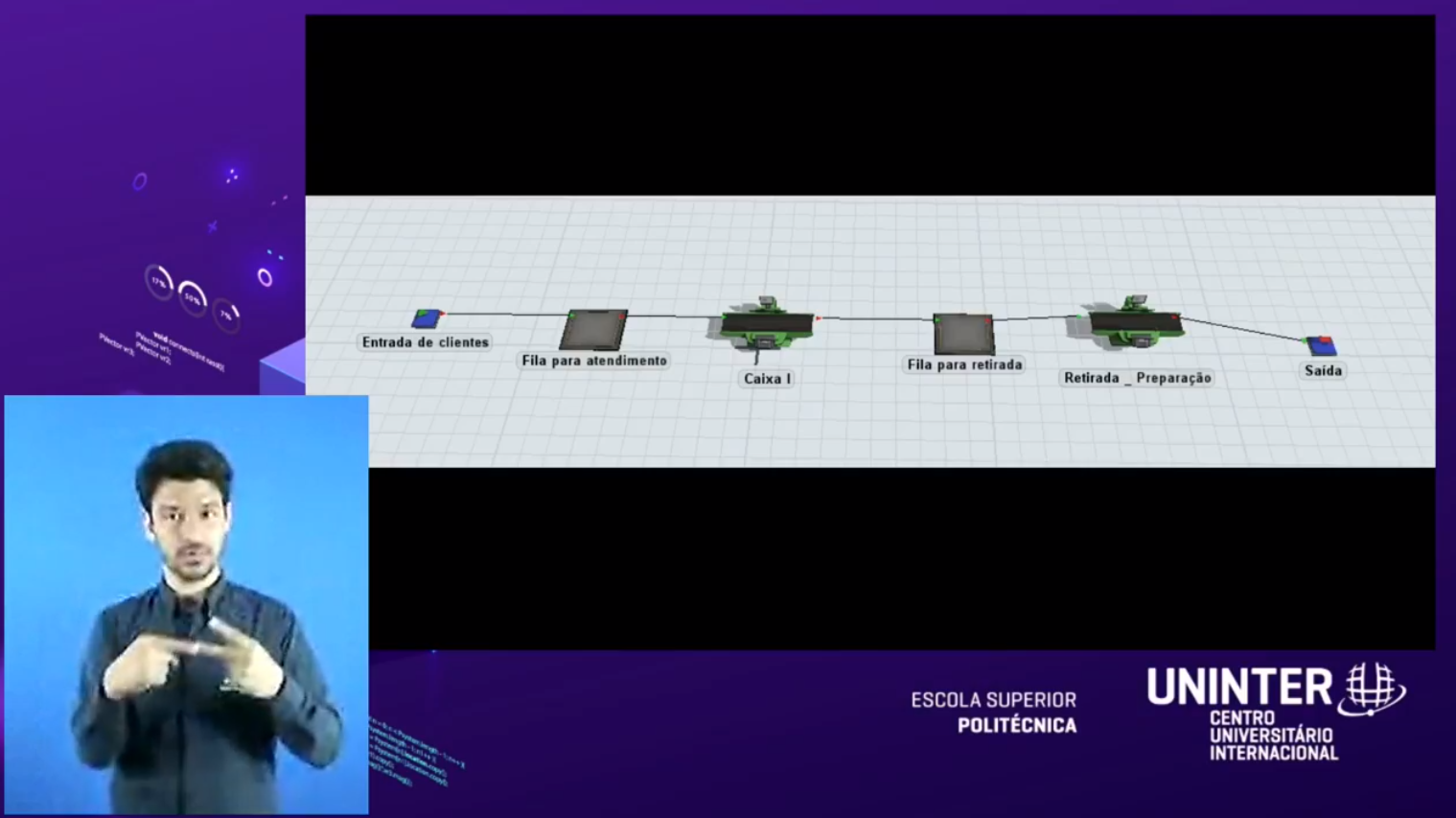
Coordenado pela professora Dayse Mendes, O uso do Flexsim na melhoria de sistemas produtivos de fast-food é um projeto que utiliza o Flexsim, um pacote de software para simulação de eventos, para simular os processos produtivos desses estabelecimentos. “O programa tem uma excelente tecnologia e fornece ferramentas que cobrem desde a manufatura até a logística. Oferece também uma incrível experiência visual, com a possibilidade de usar objetos 3D, o que permite uma simulação muito mais detalhada”, afirma Marciléia Aparecida Montes, aluna pesquisadora do projeto.
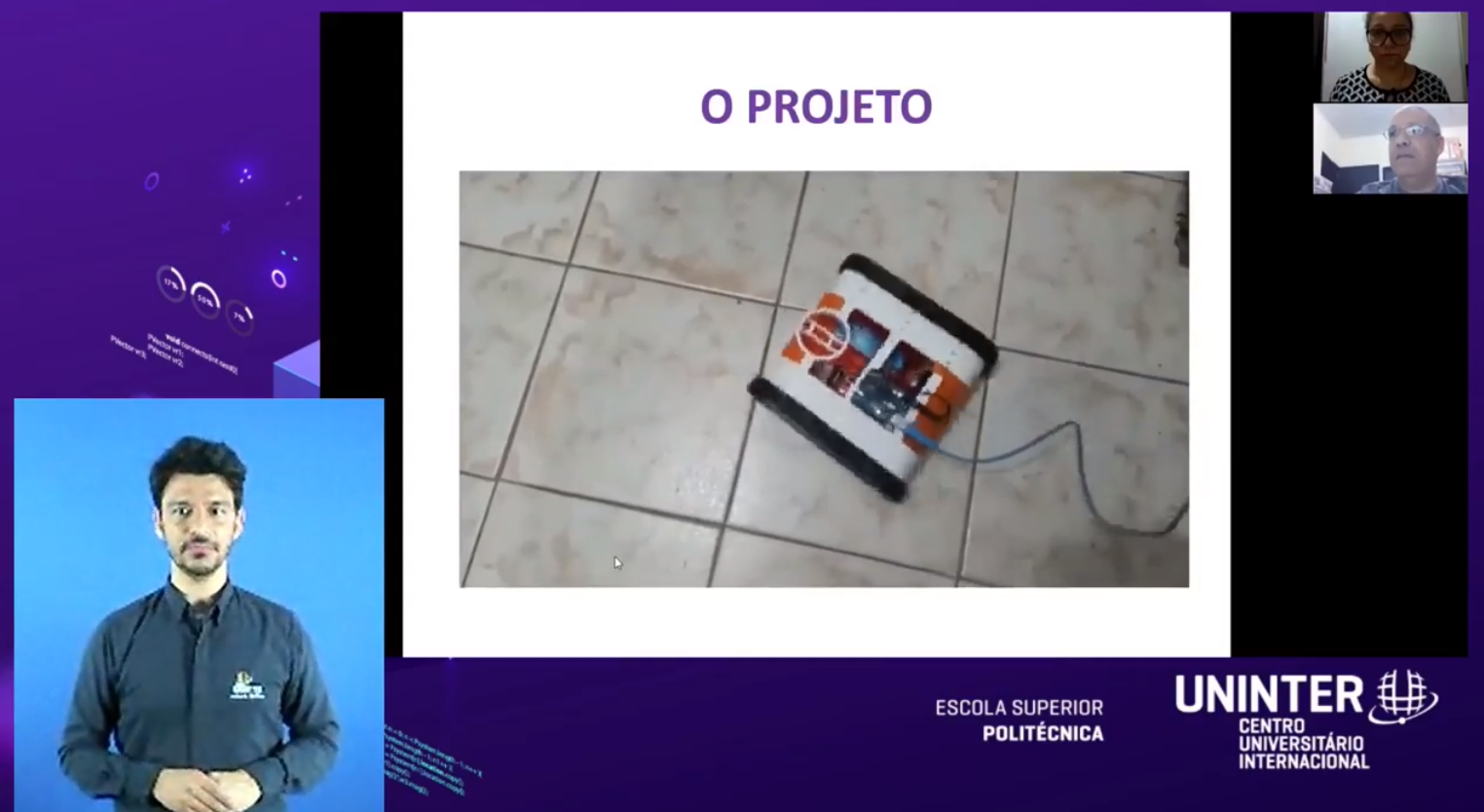
Os dois últimos projetos apresentados no Simpósio derivam de uma mesma pesquisa, também conduzida pelo professor Charles. O Controle de posicionamento de robôs por visão computacional, ficou sob a responsabilidade dos estudantes Adriana Dahmer e Andrei Schiavon. Utilizando uma estrutura de software que permite trabalhar com robôs complexos e um protótipo impresso em uma impressora 3D, os alunos desenvolveram um programa em linguagem Python para o controle e movimentação do robô.
No trabalho Detecção do distanciamento social baseado em visão computacional, apresentado pelo acadêmico Lucas Domiciano, o objetivo consiste em desenvolver uma ferramenta que possa ser aplicada em qualquer vídeo provido por câmeras. Por meio de inteligência artificial, visão computacional e modelos computacionais de redes neurais, essa ferramenta poderá detectar pessoas e determinar o distanciamento social. Lucas explica que para esse projeto o método para detecção de objetos utilizados foi o Yolo.
Para acompanhar mais detalhes do desenvolvimentos destes estudos dentro da Escola Politécnica da Uninter, é só acessar o vídeo do V Simpósio de Engenharias e Tecnologias na página do Facebook e no canal do YouTube.
Autor: Bárbara Possiede - Estagiária de JornalismoEdição: Mauri König
Revisão Textual: Jeferson Ferro